- 作者
- 赵曦
- 日期
- 2023/10/04
上一篇教程:读取(默认)数据以控制逻辑分支 ↑
下一篇教程:导出数据、发出操控指令 ↓
1. 何为责任链模式
1.1 常规用法
责任链模式(Chain of Responsibility Pattern)是一种行为型设计模式,其目的是将请求的发送者和接收者解耦,并使多个对象都有机会处理该请求。在责任链模式中,请求沿着一个链路传递,直到有一个对象能够处理它为止。
在该模式中,通常有一个抽象的处理器(Handler)作为基类,定义了处理请求的接口和链中的下一个处理器的引用。每个具体处理器(Concrete Handler)继承自抽象处理器,实现了处理请求的方法。具体处理器决定是否处理请求,如果可以处理,则进行处理;如果不能处理,则将请求传递给链中的下一个处理器。
以下是责任链模式的关键角色:
- Handler(处理器):定义了处理请求的接口和链中的下一个处理器的引用。
- ConcreteHandler(具体处理器):继承自Handler,实现了处理请求的方法,决定是否处理请求,如果可以处理则进行处理,否则将请求传递给下一个处理器。
应用责任链模式的主要优点是:
- 降低了发送者和接收者之间的耦合,发送者无需知道哪个具体处理器能够处理请求,只需要将请求发送给第一个处理器即可。
- 可以动态调整处理链的顺序或新增、删除处理器,灵活性较高。
适用于以下情况:
- 当有多个对象可以处理一个请求,但具体哪个对象将处理请求在运行时才能确定。
- 需要将请求的发送者和接收者解耦,避免直接关联。
示例
假设有一个问题反馈系统,用户可以提交问题,并由多个处理器来处理这些问题。首先,定义一个抽象的处理器(Handler)类:
#include <iostream>
class Handler
{
protected:
Handler* _next;
public:
Handler() : _next(nullptr) {}
inline void setNext(Handler* next) { _next = next; }
virtual void handleRequest(const std::string& request) = 0;
};
然后,创建两个具体的处理器 ConcreteHandler:BugHandler 和 FeatureHandler。
BugHandler 用于处理与软件缺陷相关的问题FeatureHandler 用于处理用户新功能请求
class BugHandler : public Handler
{
public:
void handleRequest(const std::string& request) override
{
if (request == "Bug")
std::cout << "BugHandler: Handling the bug report." << std::endl;
else if (_next != nullptr)
_next->handleRequest(request);
}
};
class FeatureHandler : public Handler
{
public:
void handleRequest(const std::string& request) override
{
if (request == "Feature")
std::cout << "FeatureHandler: Handling the feature request." << std::endl;
else if (_next != nullptr)
_next->handleRequest(request);
}
};
现在可以创建责任链并测试它。在下面的示例中,首先将 BugHandler 设置为责任链的第一个处理器,然后将 FeatureHandler 作为下一个处理器。
int main()
{
Handler* bugHandler = new BugHandler();
Handler* featureHandler = new FeatureHandler();
bugHandler->setNext(featureHandler);
bugHandler->handleRequest("Bug");
bugHandler->handleRequest("Feature");
bugHandler->handleRequest("Enhancement");
delete bugHandler;
delete featureHandler;
return 0;
}
输出结果将是:
BugHandler: Handling the bug report.
FeatureHandler: Handling the feature request.
在这个例子中,如果请求是 "Bug",则 BugHandler 将处理它;如果请求是 "Feature",则 FeatureHandler 将处理它;如果请求是其他类型(例如 "Enhancement"),则请求将传递给下一个处理器。这样,责任链模式允许多个对象有机会处理请求,并且可以动态调整节点顺序或新增、删除节点。
1.2 RMVL 修改后的用法
1.1 常规用法 中要定义指向下一个处理器的抽象指针,并且所有派生处理器均继承自一个基类,RMVL 功能模块不采用这种做法,因为
- 可能需要运行多个功能模块,并且功能模块之间可能存在各种各样的组合
- 每个功能模块负责的内容以及依赖的目标各不相同
因此,常规用法中的请求在 RMVL 功能模块中表示为数据组件,各功能模块的返回值 XxxInfo 则可以作为下一个功能模块的入参。可以继续参考此流程图
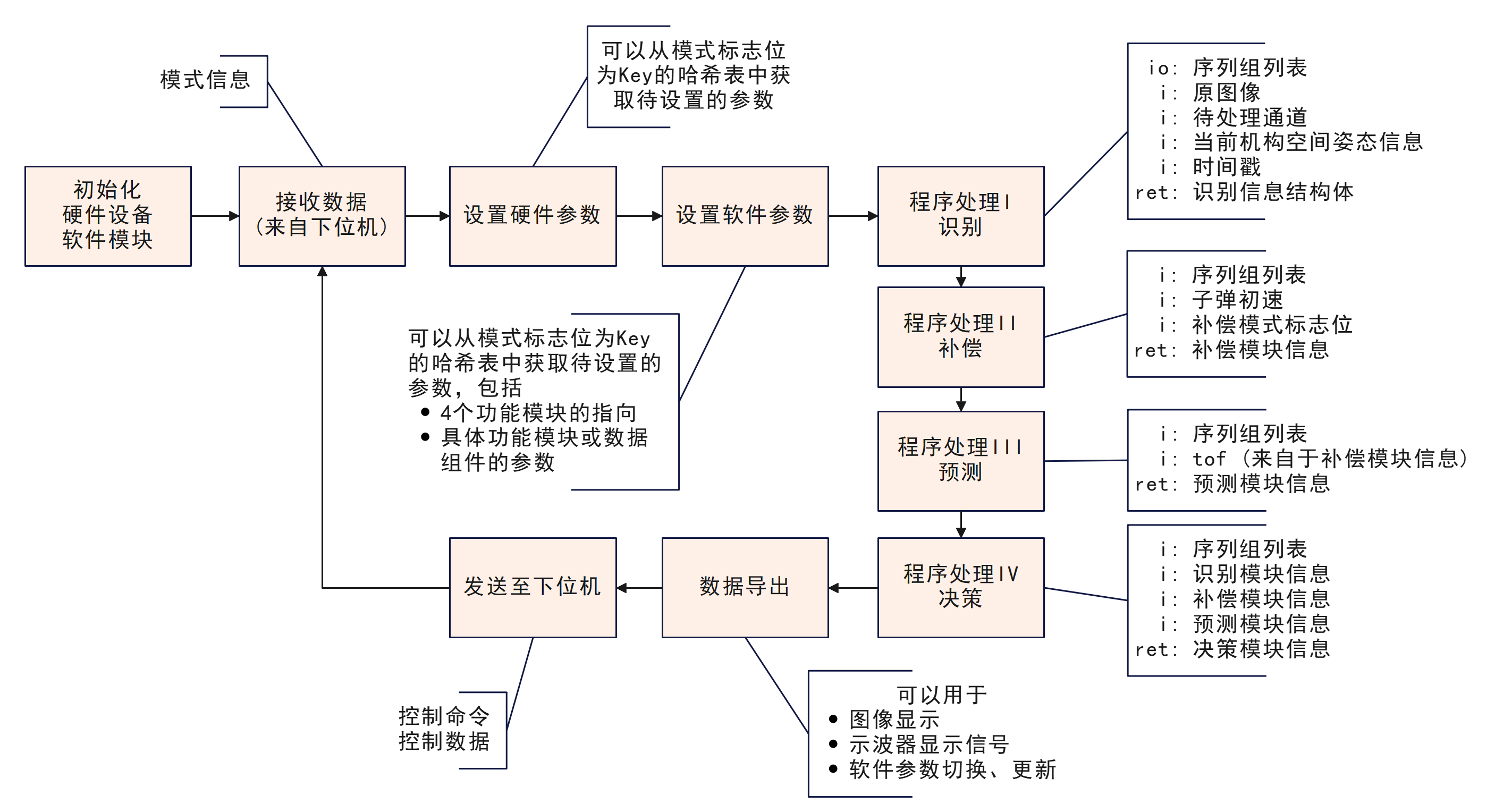
图 1 顶层模块流程图
程序处理III(预测)的入参包含了补偿模块的返回值信息 rm::CompensateInfo,程序处理IV(决策)的入参包含了前 3 个模块的返回值 rm::DetectInfo、rm::CompensateInfo、rm::PredictInfo。
2. 具体使用方法
下面给出一个简单的例子
bool run()
{
auto flag = raw_data.flag;
auto color = raw_data.color;
const auto &[detect_flag, compensate_flag, predict_flag, decide_flag, camera_flag] = flag_map[flag];
cv::Mat src;
if (!capture_map[camera_flag]->read(src))
{
return false;
}
DetectInfo detect_info{};
try
{
detect_info = detector_map[detect_flag]->detect(groups, src, color, data, getTickCount());
}
{
ERROR_(
"Occurred an exception! %s", e.err.c_str());
groups.clear();
return false;
}
auto compensate_info = compensator_map[compensate_flag]->compensate(groups, shoot_speed, CompensateType::UNKNOWN);
auto predict_info = predictor_map[predict_flag]->predict(groups, compensate_info.tof);
auto decide_info = decider_map[decide_flag]->decide(groups, detect_info, compensate_info, predict_info);
return true;
}
该类封装了有关程序中发生的错误的所有或几乎所有必要信息。异常通常是通过 RMVL_Error 和 RMVL_Error_ 宏隐式构造和抛出的
定义 util.hpp:137
#define WARNING_(...)
定义 util.hpp:36
#define ERROR_(...)
定义 util.hpp:50
注意
- 模块内部均设置了异常抛出的功能,当传入了错误的数据会抛出相应的异常,可参考 RMVLErrorCode 查看异常的类型。顶层模块需要妥善处理这些异常,例如使用
try-catch 语句来捕获异常,设置默认处理或者直接退出程序;
- 发送默认数据 与 导出数据 将在下一篇说明文档中介绍。
在完成程序处理后,需要完成数据的导出功能,包括
- 记录数据到文件
- 显示图像、打印信息到屏幕
- 发送控制指令到下位机
等需求,请参阅 导出数据、发出操控指令 一文。
 1.12.0
1.12.0